Python在OpenCV里实现极坐标变换功能实例解析
本篇文章小编给大家分享一下Python在OpenCV里实现极坐标变换功能实例解析,小编觉得挺不错的,现在分享给大家供大家参考,有需要的小伙伴们可以来看看。
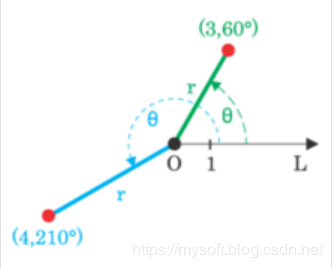
在中学里学习过直角坐标系,也叫做笛卡尔坐标系,它是正交坐标系,不过也学习过极坐标系,这种坐标系比较适合大炮发射的场合。极坐标系的定义如下:
在 平面内取一个定点O, 叫极点,引一条射线Ox,叫做极轴,再选定一个长度单位和角度的正方向(通常取逆时针方向)。对于平面内任何一点M,用ρ表示线段OM的长度,θ表示从Ox到OM的角度,ρ叫做点M的极径,θ叫做点M的极角,有序数对 (ρ,θ)就叫点M的极坐标,这样建立的坐标系叫做极坐标系。
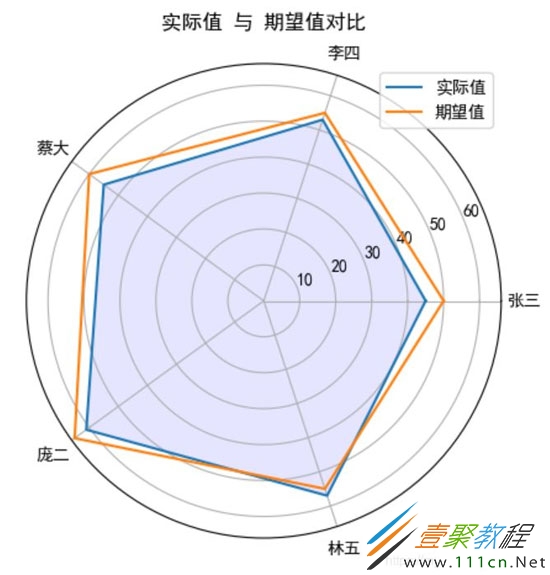
极坐标很方便应用到雷达上面,因为雷达不断地转动,反射回来的波计算出距离,再与转动的角度,就构成一个二维图的坐标了。也有人采用这样雷达图来表示公式的销售业绩,这样方便比较不同人的结果,可以看出每个人的差距。下面就使用python和matplotlib实现这样的绘图,让我们对极坐标有一个明确的理解,以便后面展开从直角坐标到极坐标的变换学习,这个例子代码如下:
#python 3.7.4,opencv4.1
#蔡军生 https://blog.csdn.net/caimouse/article/details/51749579
#
import matplotlib.pyplot as plt
import numpy as np
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号
employee = ["张三", "李四", "蔡大", "庞二", "林五"]
actual = [45, 53, 55, 61, 57, 45]
expected = [50, 55, 60, 65, 55, 50]
# 设置图形大小和极坐标方式显示
plt.figure(figsize=(5, 5))
plt.subplot(polar=True)
#角度坐标生成
theta = np.linspace(0, 2 * np.pi, len(actual))
# 设置极坐标的标记
lines, labels = plt.thetagrids(range(0, 360, int(360/len(employee))), (employee))
# 在极坐标显示销售数值
plt.plot(theta, actual)
plt.fill(theta, actual, 'b', alpha=0.1)
# 极坐标显示期望销售数值
plt.plot(theta, expected)
# 添加标注和标题
plt.legend(labels=('实际值', '期望值'), loc=1)
plt.title("实际值 与 期望值对比")
# 显示点到屏幕
plt.show()
输出结果如下:
PHP之友评论